基于proteus的可视化设计(4)——电机控制
在上一篇文章中,我介绍了显示屏的一些用法,今天给大家介绍proteus可视化设计中,电机的一些用法


1.直流电机
(1).直流电机简介
直流电机有有刷电机和无刷电机两种,两者不同之处在于结构和原理不同,且两者各有优劣。
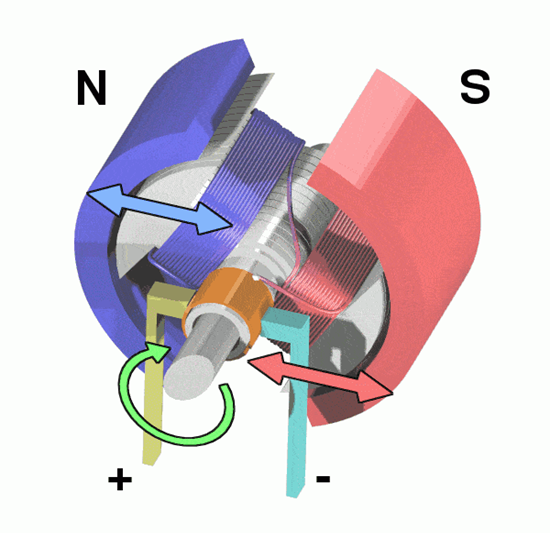
直流电机的一些特点:
- 1、调速性能好,调速范围广,易于平滑控制
- 2、起动、制动转矩大,易于快速起动、停车
- 3、易于控制
- 4、通过调整直流电压可以实现电机的调速
- 5、改变供电电压极性可以实现改变电机旋转方向
(2).proteus提供的模块介绍
proteus可视化设计中,提供了许多的电机模块
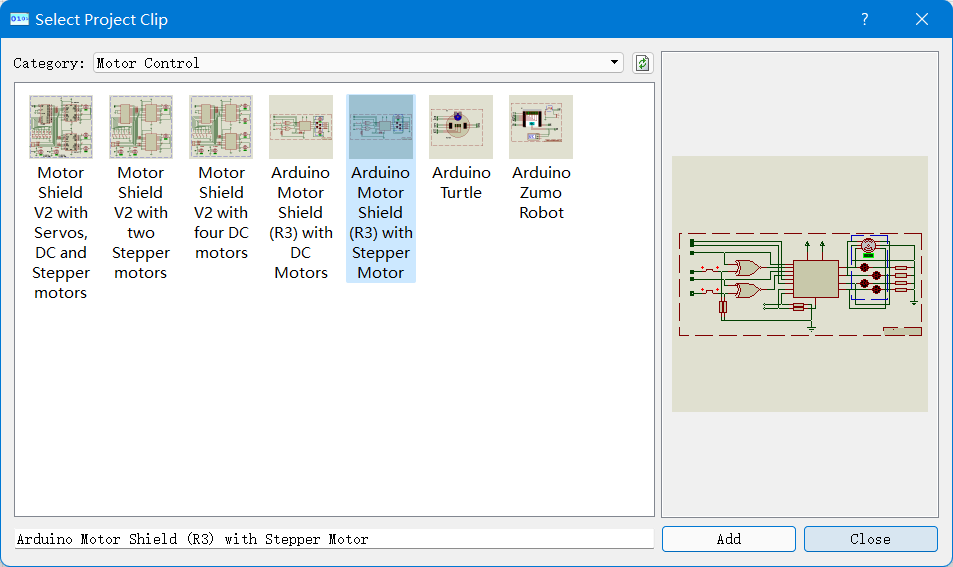
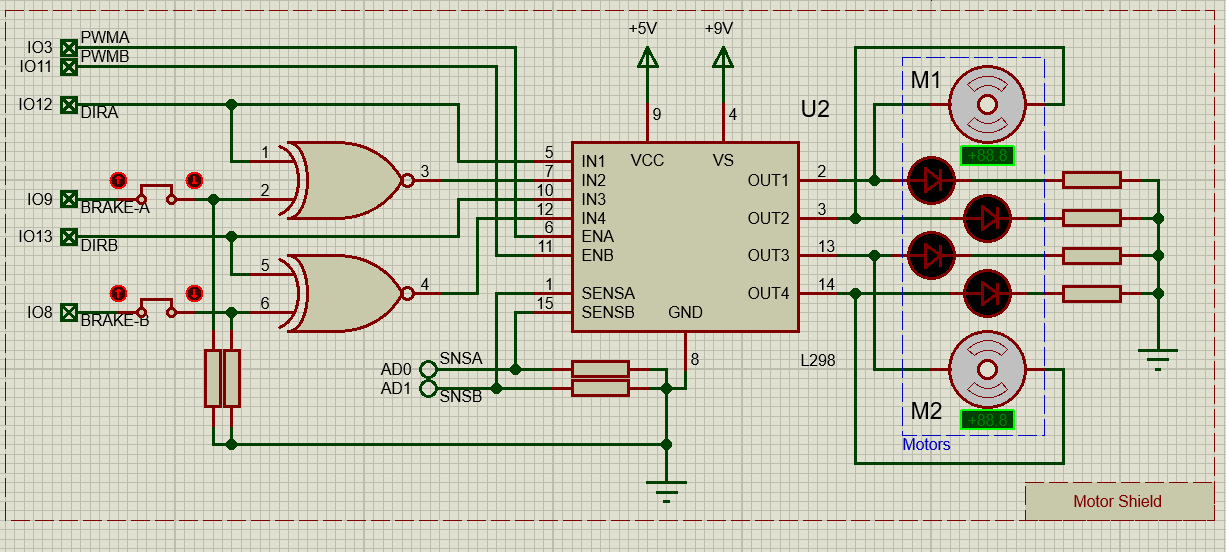
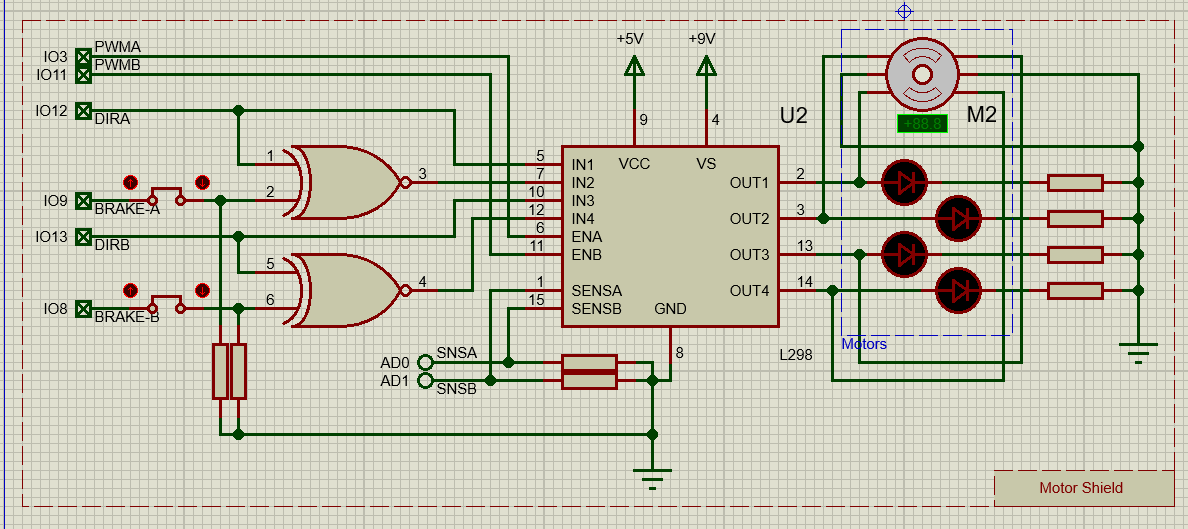
介绍一个直流电机驱动模块——L298双路直流电机驱动器
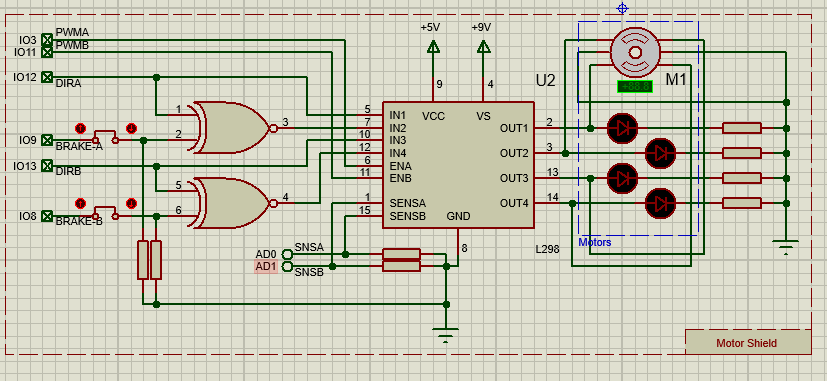
关于L298双路直流电机驱动器:
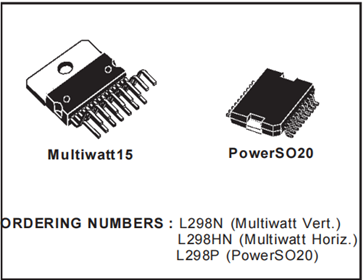
L298是一个集成的单片电路,它有两种封装。它是一个高压,高电流双全桥驱动器设计到接受标准化TTL逻辑电平和驱动感应负载,例如:继电器,螺线管,直流电机。有以下特点:
- 双H全桥驱动;
- 电源工作电压最高达46V;
- 总输出直流电流高达4A;
- 过热的保护。
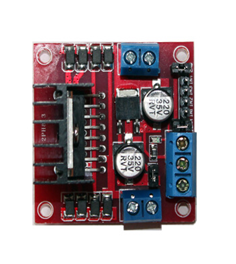
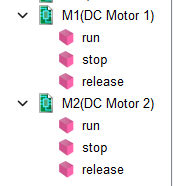
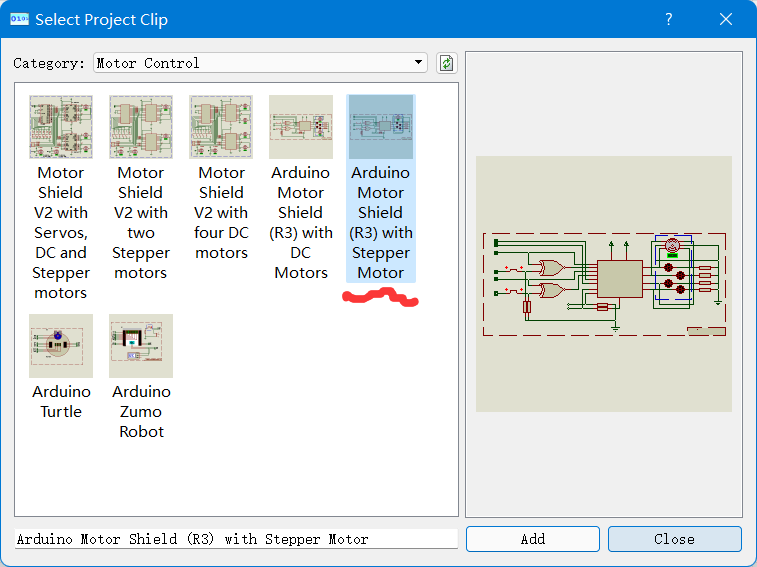
这里介绍这个模块:Arduino Motor Shield (R3) with DC Motors
电机模块方法:
- 1.run:电机旋转,参数dir设定方向,speed:设定速度(0~255)
- 2.stop:电机停止。
- 3.release:电机释放(自由、不受控)
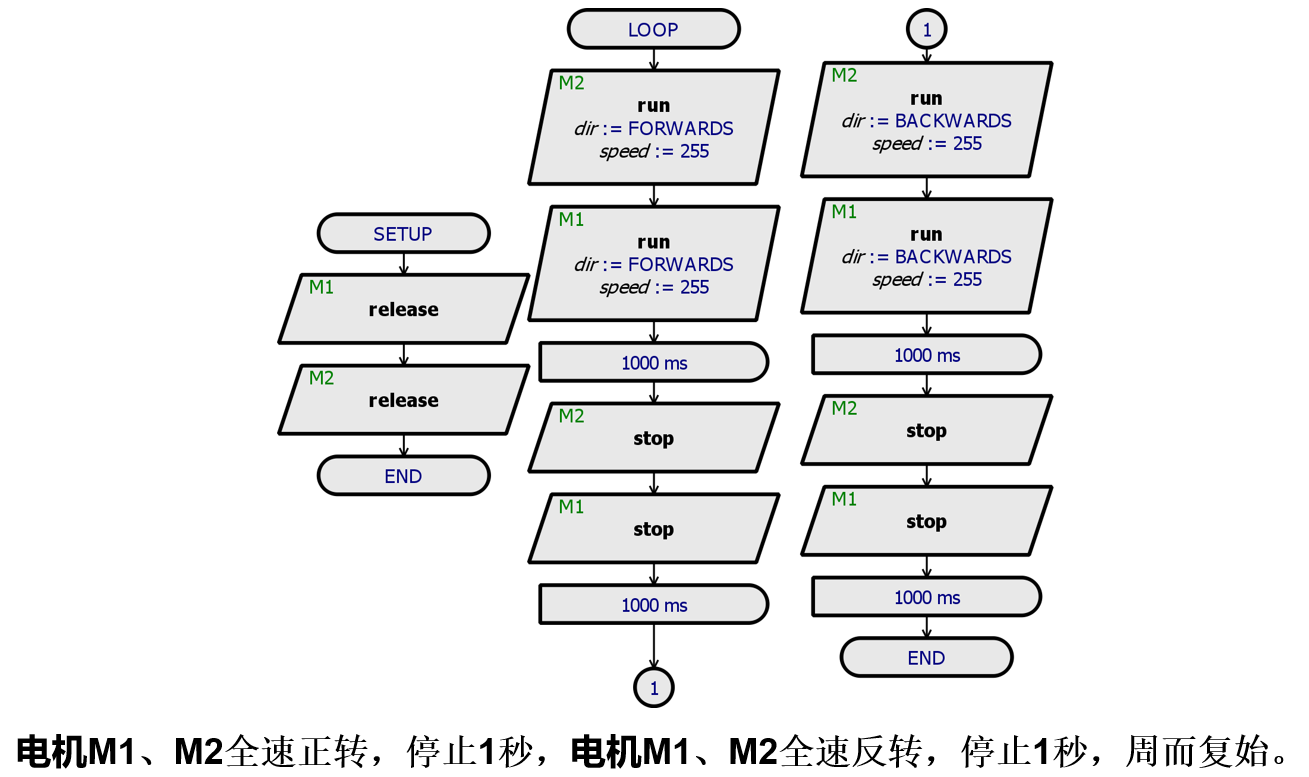
一个例程参考
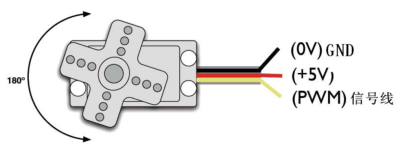
2.舵机控制
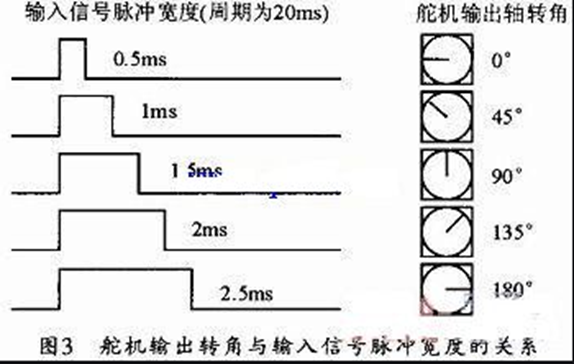
舵机采用脉冲宽度控制舵机旋转角度
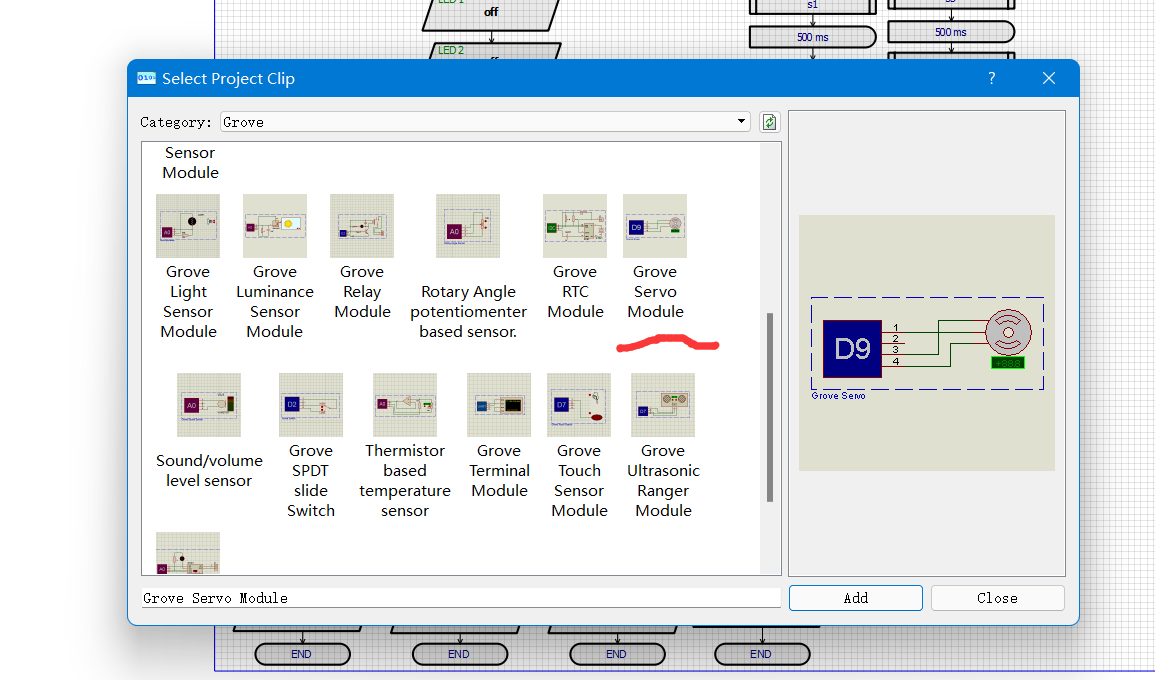
可视化设计中,在Grove中,有舵机模块,如下图:
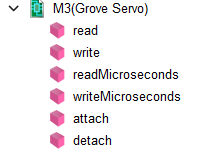
方法:
1.read:读舵机的转动角度
2.write:写舵机的转动角度(0~180°)
(0
180°)对应舵机转动(-90°+90°)。3.readMicrosconds:读舵机控制的脉冲宽度(微秒)
4.writeMicrosconds:写舵机控制的脉冲宽度(微秒)
(1000
2000)对应舵机转动(-90°+90°)5.attach:重新使用引脚控制
6.detach:拆分引脚控制
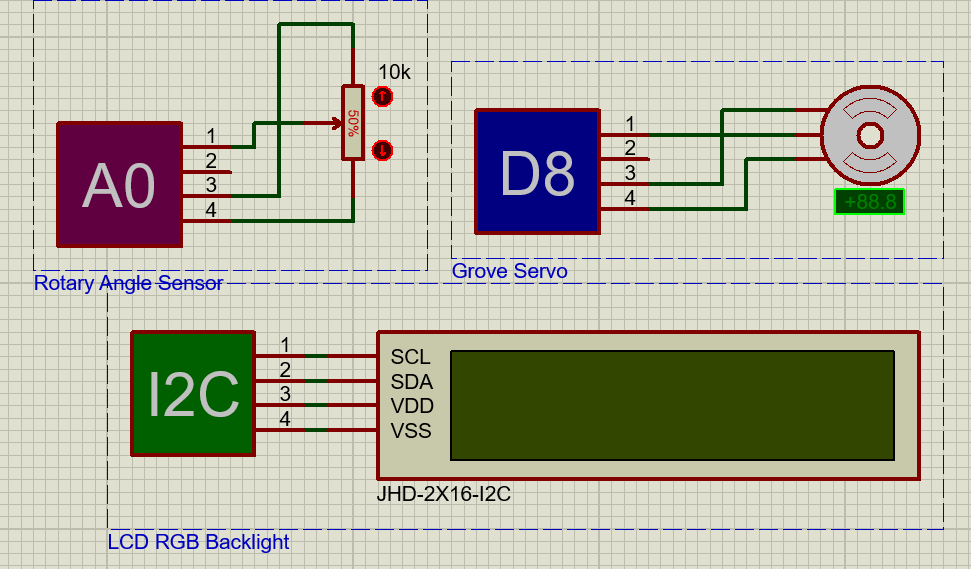
这次,自己来设计一个例程
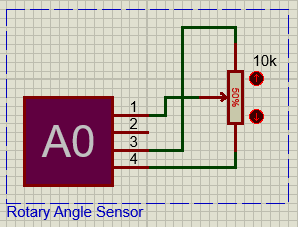
首先,先在Grove中添加一个电位器模块:
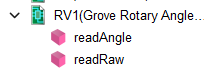
方法:
- 1.readAngle:读旋转角度(0~300°)
- 2.readRaw:读A/D测量原始值(0~1024)
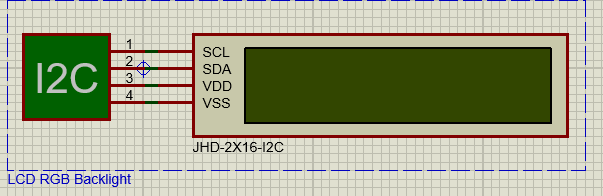
然后,再添加一个LCD1602模块
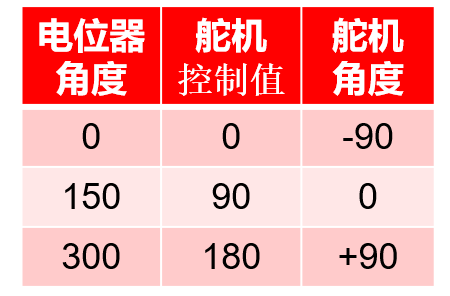
所需模块都添加完成了,现在可以来设计程序了,这次实现的功能是:电位器(0300°)旋转,控制舵机(-90°+90°)旋转,并在LCD上显示角度。
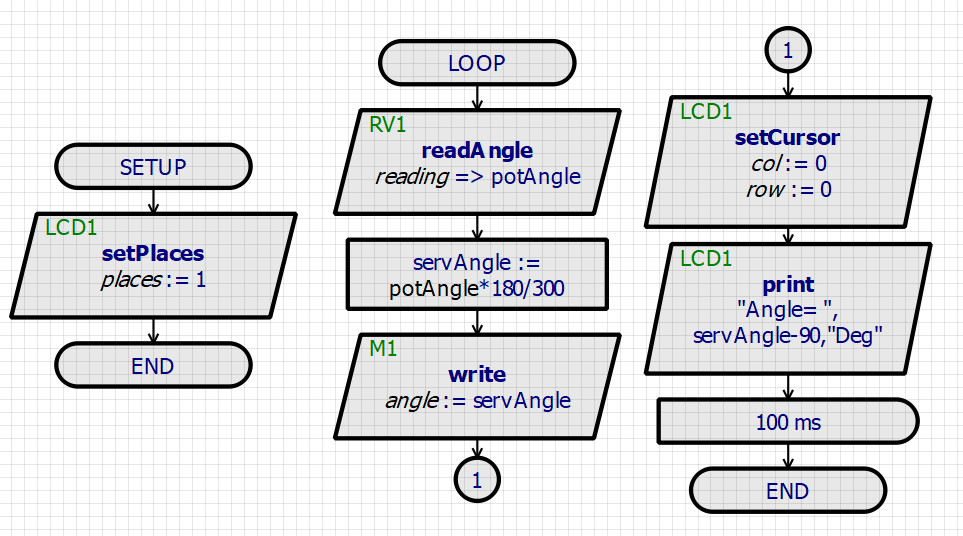
流程图:
仿真验证:
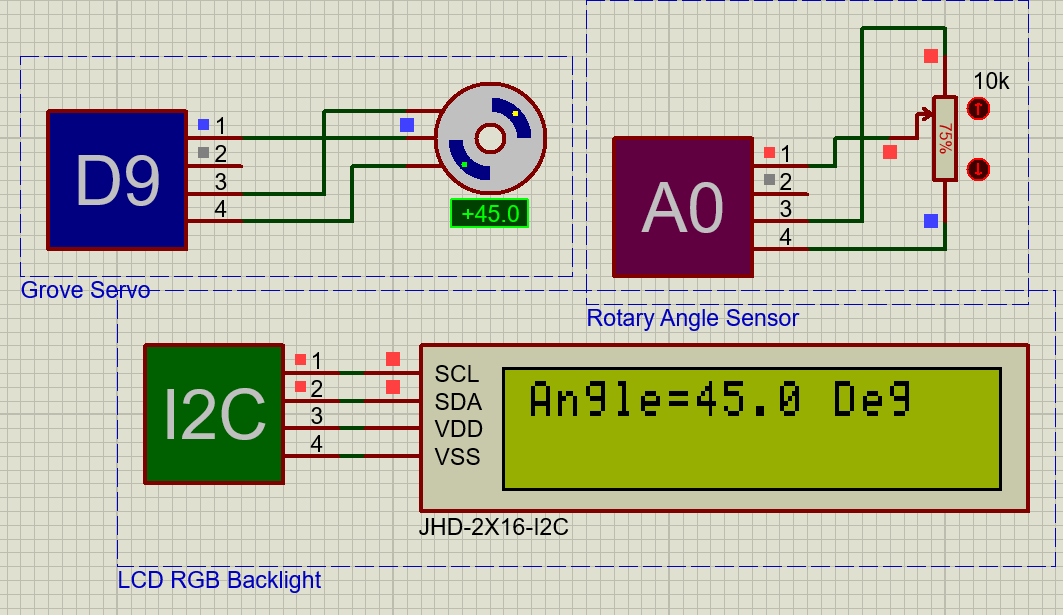
通过调节电位器的角度,可以改变舵机的角度,具体值如下:
3.步进电机

(1).步进电机简介
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为”步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器。
(2).proteus中提供的步进电机模块
方法说明:

- 1.step:前进多步
- 2.oneStep:前进一步
- 3.release:释放电机控制
- 4.setSpeed:设置电机转速(转/分)